kreatives-chaos.com
Elektronik und Roboterbau
Themen:
AVR, avr-gcc, CAN, CPLD, Elektronik, Mikrocontroller, MSP430, PIC, Roboter, Schaltungen, Sensoren, Software, Testboards
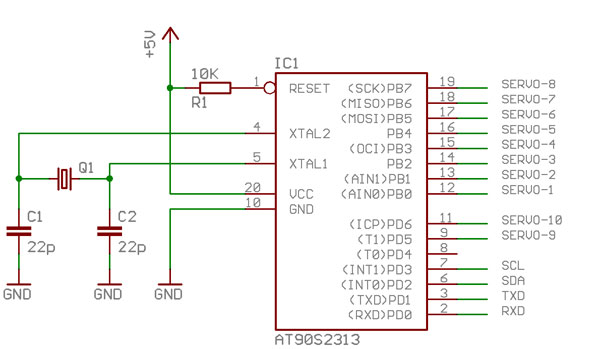
Servocontroller RNKC10
Tags: AVR,
Schaltungen
Stand: 6. Oktober 2006, 15:00
2 Kommentar(e)
- Ansteuerbar über die serielle Schnittstelle
- Ansteuerbar über I2C Bus
- Anschlüsse für bis zu 10 Servos
Der RNKC10 wird im Moment unter andern in dem Roboternetzboard RNB-FRA1 und der Servoplatine eingesetzt.
Ansteuerung über I2C
Der RNKC10 hat die Adresse 0x50 (80). Es müssten zusätzlich zur Adresse noch zwei weitere Parameter gesendet werden. Als erstes die Servonummer (0 bis 9), dann die Position des Servos (0 bis 255).
Der RNKC10 unterstützt bis jetzt leider noch nicht die normale I2C Geschwindigkeit (100 kHz), die maximale Taktfrequnez beträgt im Moment ca. 20 kHz.
Serielle Ansteuerung
Die Ansteuerung über die serielle Schnittstelle erfolgt ganz ähnlich zu der Ansteuerung per I2C. Zuerst werden zwei Synchronisationsbytes (#S) gesendet. Dann folgt die Nummer des Servos und dann die Position.
Es müssen also immer vier Bytes übertragen werden. Um zum Beispiel Servo 1 in die Mittelstellung zu bringen müssten also folgende Werte gesendet werden:
0x23 (35)
0x53 (83)
0x01 (1)
0x7F (127)
Die Baudrate beträgt dabei 9600 Baud.
Downloads:
rnkc10.zip [213.83 kB]Lizenz
 Alle Inhalte dieser Website sind, soweit nicht anders gekennzeichnet, unter einer Creative Commons 2.0 License veröffentlicht.
Alle Inhalte dieser Website sind, soweit nicht anders gekennzeichnet, unter einer Creative Commons 2.0 License veröffentlicht.
Wenn Sie sich für eine kommerzielle Verwertung meiner Inhalte interessieren, kontaktieren Sie mich bitte direkt.
Kommentare
# Max meinte am 25. Januar 2007, 00:12 dazu:
Hallo, Läuft das Programm auch auf dem Nachfolger des AT90s3213, also den ATTINY 2313?Oder kann man es leicht ändern? Den AT90S2313 gibt es ja so gut wie nicht mehr zu kaufen. mfg max
# Fabian Greif meinte am 25. Januar 2007, 02:23 dazu:
Im Prinzip sollte es ohne allzu große Änderungen auch auf einem Tiny2313 laufen. Ob es Binärkomptibel ist kann ich dir auswendig leider nicht sagen.
Die Software wird allerdings nicht mehr weiterentwickelt. Der Nachfolger ist S8IO, der ist speziell auch für den ATTiny2313 angepasst. Leider gibt es im Moment erst nur die RS232 Version, die I2C Version wird aber auch irgendwann folgen (sobald ich wieder mehr Zeit habe ;-)
Deine Meinung: